Research Article: 2021 Vol: 25 Issue: 1
The Impact of Emotions on Consumer Attitude Towards a Self-Driving Vehicle: Using the Pad (Pleasure, Arousal, Dominance) Paradigm to Predict Intention to Use
Kevin Elliott, Professor of Marketing, Department of Marketing and
International Business, Minnesota State University, Mankato
Mark Hall, Professor of Marketing, Department of Marketing and
International Business, Minnesota State University, Mankato
Juan Gloria Meng, Professor of Marketing, Department of Marketing and International Business, Minnesota State University, Mankato
Abstract
This study examines the efficacy of the PAD (Pleasure, Arousal, Dominance) model in predicting consumer attitude towards a self-driving vehicle. A 23 - item questionnaire was developed in accordance with the PAD framework, and a survey of the general public was then conducted using Qualtrics (n = 1,050). The findings indicate that the hedonic motive of pleasure is a significant predictor of a consumer’s attitude towards a self-driving vehicle. The results also show that arousal and dominance directly impact the perceived pleasure related to the use of a self-driving vehicle. The implications of these findings are discussed and suggestions for future research are provided.
Keywords
Consumer Attitudes, Self-Driving Vehicles, PAD, Pleasure, Arousal, Dominance.
Introduction
A body of research exploring U.S. consumer knowledge and attitude towards self-driving vehicles has emerged in the last few years. Even so, a number of issues surrounding the topic are not yet fully understood and as such are deserving of further investigation. One of the most critical of these issues involves the factors that may affect the adoption/acceptance of the self-driving concept and the technology. A 2019 J.D. Power Mobility Confidence Index Study found that almost two thirds of U.S. consumers admitted to having little to no knowledge about self-driving vehicles. Gen Z respondents indicated the most knowledge regarding self-driving vehicles, while Baby Boomers expressed the least amount of knowledge. This same study found that industry experts recognize the importance of marketing self-driving technology to consumers to build understanding, trust, and acceptance.
Lavieri et al. (2017) report that lifestyle factors may also affect the acceptance of self-driving vehicle. Younger, urban residents who are well educated and technologically savvy are more likely to be early adopters of self-driving technologies than older, suburban and rural individuals. Consumer attitude towards a self-driving vehicle will also be an important factor in the consumer adoption process for self-driving vehicles. Consumer attitudes are dynamic and change over time as consumers are exposed to more information through various promotional activities and word-of-mouth communication from family and friends. Ness (2016) found that familiarity with self-driving vehicle technology and exposure to articles about self-driving vehicles were both positively related to consumer acceptance of self-driving vehicles.
Research has shown that drivers who are initially passionate about driving may change their attitudes in favor of autonomous driving after additional product information (Pettersson & Karlson, 2015). Automotive manufacturers will need to determine the critical factors that influence consumers’ attitude towards a self-driving vehicle prior to promoting and introducing this type of vehicle into the marketplace.
Much of the current research regarding the prediction of consumer acceptance of self-driving vehicles has been focused on the utilitarian motivations of self-driving vehicles, such as perceived usefulness, perceived ease of use, and perceived safety (Madigan et al., 2017; Panagiotopoulos & Dimitrakopoulous, 2018; Sener et al., 2019). Other studies have also shown that trust (Choi & Ji, 2015, Buckley et al., 2018; Zhang et al., 2019) and perceived risk (May et al., 2017; Xu et al., 2018; Zhang et al., 2019) are significant factors in influencing acceptance of self-driving vehicles. Social influence has also been reported as a significant predictor of intention to use a self-driving vehicle (Leicht et al., 2018; Zhang et al., 2020).
Little attention to date, however, has been placed on the hedonic motivations of pleasure, fun, and enjoyment as they relate to self-driving vehicles. Shopping motives are typically categorized into two types: utilitarian (task oriented, rational, and cognitive) and hedonic (positive sensations arising from the experience itself). Babin et al. (1994) demonstrated that distinct utilitarian and hedonic shopping value dimensions exist and are related to a number of important consumption variables. Research findings reveal that consumers’ positive attitudes towards technology are elicited by both utilitarian and hedonic motivations, emphasizing that when consumers use a technology designed to provide hedonic benefits, they tend to have hedonic motivations rather than utilitarian ones (Papagiannidis et al., 2017).
Mehrabian & Russell (1974) introduced a psychological framework used to describe and measure emotional states (Pleasure, Arousal, Dominance – PAD). More specifically, PAD describes human perceptions and experiences of the physical environment in relation to pleasure, arousal, and dominance dimensions. Bakker et al. (2014) argue that the original ideas of Mehrabian & Russell (1974) about pleasure, arousal and dominance regarding the environment are valid, and that pleasure, arousal and dominance can be respectively related to affective, cognitive and conative responses.
The purpose of this study is to examine the efficacy of the PAD model in predicting consumer attitude towards a self-driving vehicle. This study is one of the first to empirically test the effectiveness of the PAD model in predicting attitude towards a self-driving vehicle. It is also one of the few studies to treat the emotional components of the PAD model as interrelated. Mehrabian & Russell (1974) introduced pleasure, arousal and dominance as three independent emotional dimensions to describe an individual’s state of feeling. This paper proposes a model where the three emotional states are interrelated, where pleasure depends on the other two emotions (arousal and dominance), and where pleasure is then a direct predictor of consumer attitude towards a self-driving vehicle.
Literature Review
Self-Driving Vehicles
Studies suggests that 10-30% of all vehicles sold in the U.S. will be fully self-driving by 2030 (Mims, 2019). Automotive manufacturers appear to be racing to grab a share of the self-driving vehicle market, estimated to generate a $7 trillion economic opportunity by 2050 (Macleod & Santarini, 2019). Automakers, tech giants, and specialty startups have invested at least $50 billion during the last few years to develop self-driving technology (Craig and Lofton, 2019). According to the newly released government guidelines, Ensuring American Leadership in Automated Vehicle Technologies (2020), the U.S. federal government will provide guidance and best practices, conduct research and pilot programs, and provide other assistance to help stakeholders plan and make investments for the introduction of automated vehicle technology in the coming decades. Moreover, the U.S. federal government is actively funding automated vehicle technology research in the areas of safety, mobility, security and cybersecurity, infrastructure, and connectivity.
A self-driving vehicle has been commonly defined as a computer-controlled vehicle that drives itself. U.S. regulators and the Society of Automotive Engineers (SAE) have identified the following six levels/stages of driving automation:
SAE Level 0 (No automation): human driver is at the control of the driving task even when equipped with warning and/or intervention systems.
SAE Level 1 (Driver assistance): human driver performs all aspects of the dynamic driving task when automated system can assist the driver with one driver assistance system of either steering or acceleration/deceleration.
SAE Level 2 (Partial automation): human driver performs all aspects of the dynamic driving task when automated system can assist the driver with one or more driver assistance systems of both steering and acceleration/deceleration.
SAE Level 3 (Conditional automation): automated driving system performs all aspects of driving mode-specific performance; however, the human driver must be ready to take back control to a request to intervene.
SAE Level 4 (High automation): automated driving system performs all aspects of driving tasks, even if a human driver does not need to take back control to a request to intervene. However, the automated system can operate only in certain environments and under certain conditions.
SAE Level 5 (Full automation): the automated system performs all driving tasks, in any environment and under all conditions that can be conducted by a human driver (SAE International, 2018).
The National Highway Traffic Safety Administration has identified four potential benefits of self-driving vehicles: safety, economic and social benefits, efficiency and convenience, and mobility (National Highway Traffic Safety Administration, 2020). Litman (2020), however, argues that many predictions of self-driving benefits are speculative and exaggerated, and often made by individuals with financial interests in the industry.
Technical Dimensions of Self-Driving Vehicles
Most fully self-driving vehicles are expected to be completely electric (Litman, 2020). In addition, they will be lighter than human-driven vehicles, and primarily made from aluminum, magnesium, and carbon reinforced plastic components (Craig & Lofton, 2019). New technologies for these vehicles will include electronic sensors that determine distance between the vehicle and obstacles, navigation systems with built-in maps to guide the vehicle direction and location, cameras that provide 360-degree views around the vehicle, and dedicated short-range communications to monitor road conditions, congestion, crashes, and possible rerouting (Canis, 2017).
Projections estimate that self-driving vehicles will likely cost more than human-operated vehicles (Litman, 2020). In addition, reports suggest that self-driving vehicles repair costs will be higher and the repair more complexed (Craig & Lofton, 2019). Current advanced driver assistance system sensors (cameras, radar and ultrasound) approximately double minor collision damage costs, typically adding $3,000 to a repair bill (AAA, 2018). Vehicle batteries must also be replaced approximately every 100,000 miles, which currently costs $3,000-15,000 (Litman, 2020). However, self-driving vehicles should provide savings for commercial use, such as for trucks and buses where driver wages and benefits are a major expense (Litman, 2020).
Social Dimensions of Self-Driving Vehicles
Self-driving vehicles will create a number of government planning and policy issues (Taeihagh & Lim, 2018). Reports suggest that some of the important planning and policy goals for self-driving vehicles should be: 1) Social Inclusion – be affordable and accessible to a broad population; 2) Environmental Sustainability – support environmental concerns; 3) Sensitive Data Management – protect private consumer information; and 4) Transport Network Design – transport networks to be safe for all modes of transportation (Papa & Ferreira, 2018). Similarly, Litman (2019) argues that planning requirements should address such issues as affordability for all income levels, reduction in traffic congestion, increased safety, and environmental protection.
Related to these policy needs and requirements is the feeling that automobile travel is likely to increase with self-driving vehicles, resulting in more traffic congestion and negative environmental effects (Fraedrich et al., 2019). In addition, concerns as to who will be liable if the vehicle crashes will need to be addressed (Craig & Lofton, 2019). Not surprisingly, Bellet et al. (2019) argue that the insurance industry and liability experts will be central to the move towards self-driving vehicles.
Marketers currently have limited information regarding the extent to which consumers will embrace this new automotive technology. Consumer perceptions and attitudes towards self-driving vehicles will likely play a major role in the speed at which these vehicles are adopted by the general driving population. How consumers perceive the usefulness, ease of use, and safety of the self-driving vehicle will be critical to the long-term success of this type of vehicle (Madigan et al., 2017; Panagiotopoulos & Dimitrakopoulous, 2018; Sener et al., 2019).
Conceptual Framework and Hypotheses
Mehrabian & Russell (1974) introduced the PAD model, which proposed the theory that physical or social stimuli in the environment directly affect the emotional state of an individual, thereby influencing his or her behavior. Pleasure relates with whether an individual perceives the environment as enjoyable or not. Arousal reflects the extent to which the environment stimulates an individual. Dominance assesses whether an individual feels in control of his/her environment.
Donovan & Rossiter (1982) were the first to apply the PAD model to a retail setting. The focus of their research was on store atmosphere. The authors concluded that pleasure had a strong impact on a consumer’s behaviors within the retail environment, including the tendency of consumers to spend beyond their original expectations. Arousal was found to increase time spent browsing and exploring products in the store, however, dominance was found to not relate well to in-store behaviors.
Earlier store atmosphere studies regarding PAD have been extended to the online retail environment. Eroglu et al. (2003) findings suggest that pleasure and arousal have a significant impact on online shoppers’ attitudes, satisfaction, and approach behaviors (e.g., desire to stay in, look around, explore, or communicate with others in the online environment). Similarly, Fiore et al. (2005) report a significant relationship between hedonic value and willingness to patronize on‐line stores. The PAD model has also been used in more recent studies in attempts to better understand retail web-site aesthetics (Chang et al., 2014; Hsieh et al., 2014; Koo & Lee, 2011).
Most studies regarding PAD have viewed pleasure, arousal, and dominance as three independent variables, with no relationships between them. However, studies in which the three components are treated as being completely independent of each other may be missing some of the complexity and explanatory power of the PAD model. Yani-de-Soriano et al. (2013) was one of the first studies to investigate and find a three-way interaction between pleasure, arousal, and dominance in the context of purchase and consumption. The authors argue that their findings demonstrate the importance of examining the simultaneous effects of PAD on consumer behavior.
Miniero et al. (2014) also tested for the interrelationship among the three PAD variables and found that arousal and dominance affected pleasure positively and significantly as it relates to artist and cultural consumption. Hall et al. (2017) examined the power of the PAD model as three interrelated dimensions in explaining user attitudes toward their Facebook experience.
In reviewing the PAD literature, the following conclusions are plausible: 1) the three emotional dimensions in the PAD model are likely interrelated, 2) the arousal dimension has the potential to directly impact the pleasure associated with experiencing a product or service, 3) the dominance dimension is capable of directly affecting both the arousal and pleasure associated with the purchase of a product or service, and 4) the pleasure dimension is likely to impact the attitudes and/or intentions towards a product or service. These conclusions contribute to the development of the following theoretical model and hypotheses as they relate to the intention to use a self-driving vehicle.
Arousal
Arousal is a mental activity describing the state of feeling along a dimension ranging from sleep to frantic excitement, and can be described by adjectives such as stimulated-relaxed, excited-calm and wide awake-sleepy (Mehrabian & Russell, 1974). Miniero et al. (2014) reported arousal having a positive and significant effect on pleasure as it relates to the visitation of a cultural heritage site. Similarly, Hall et al. (2017) found arousal to have a direct effect on the pleasure associated with being on Facebook. In addition, Nordhoff et al. (2016) included arousal in their conceptual model for predicting user acceptance of self-driving vehicles, and hypothesize that arousal has a positive effect on acceptance of autonomous vehicles. Based on prior research, and as shown in Figure 1, the following hypothesis is proposed:

Figure 1 Hypotheses
H1: Arousal has a positive effect on Pleasure as it relates to the use of a self-driving vehicle.
Dominance
Dominance relates to the feeling of control and the extent to which an individual feels restricted in his/her behavior. In defining dominance, Mehrabian & Russell (1974) used a continuum ranging from dominance to submissiveness, with adjectives to include controlling, influential and autonomous. Hall et al. (2017) reported dominance having a direct effect on the arousal associated with being on Facebook, as well as a significant effect on pleasure that evolves from the Facebook experience. Similarly, Yani-de-Soriano et al. (2013) argue that dominance will have an effect on both arousal and pleasure as they relate to online approach behaviors. Miniero et al. (2014) also found dominance to have a positive and significant effect on pleasure as it relates to the visitation of a cultural heritage site. Finally, Nordhoff et al. (2016) included dominance in their conceptual model for predicting user acceptance of self-driving vehicles, and hypothesize that dominance has a positive effect on acceptance of autonomous vehicles. Based on prior research, and as shown in Figure 1, the following hypotheses are proposed:
H2: Dominance has a positive effect on Arousal as it relates to the use of a self-driving vehicle.
H3: Dominance has a positive effect on Pleasure as it relates to the use of a self-driving vehicle.
Pleasure
Pleasure is a continuum that can be defined with adjectives such as happy-unhappy, pleased-annoyed, and satisfied-unsatisfied (Mehrabian & Russell, 1974). Purwanto et al. (2019) found pleasure to be a significant predictor of intention to use e-wallet technology. Hall et al. (2017) also found pleasure to significantly impact an individual’s attitude towards Facebook. In addition, Nordhoff et al. (2016) included pleasure in their conceptual model for predicting user acceptance of self-driving vehicles, and hypothesize that pleasure has a positive effect on acceptance of autonomous vehicles. Based on prior research, and as shown in Figure 1, the following hypothesis is proposed:
H4: Pleasure has a positive effect on Attitude Towards a Self-Driving Vehicle.
Attitude Towards a Self-Driving Vehicle
An individual’s attitude towards using technology is defined as the degree to which a person has a favorable or unfavorable evaluation of using technology. Rogers (2003) found that innovation adoption decisions are determined by the overall attitude of potential users toward innovations. Therefore, the diffusion of self-driving vehicles is likely to be significantly affected by the public’s attitude towards them.
Charness et al. (2018) argue that attitudes towards self-driving technology can significantly impact the adoption of self-driving vehicles. Osswald et al. (2012) included attitude towards using technology as a predictor of intention to use self-driving vehicles in their theoretical model (CTAM). Jing et al., (2020) also propose in their theoretical model that attitude towards autonomous vehicles will directly impact acceptance of autonomous vehicles. Based on prior research showing attitude towards a self-driving vehicle having a direct effect on intention to use a self-driving vehicle, and as shown in Figure 1, the following hypothesis is proposed:
H5: Attitude Towards a Self-Driving Vehicle has a positive effect on Intention to Use a Self-Driving Vehicle.
Methodology
Data Collection
Data were collected from 1,050 respondents using Qualtrics. The demographic profile of respondents appears to be reflective of the general population. Of the sample respondents, 49.3% were men and 50.7% were women. Regarding age of respondent, 21.6% were 18-29; 25.5% were 30-44; 25.9% were 45-60; and 27% were 60 or older. Respondents were generally well educated, with 35.7% having a high school degree; 26.9% obtaining an associate or bachelor’s degree; and 11.4% possessing at least a master’s degree. Approximately 49% of respondents reported household income of $50,000 or higher.
A 23-item questionnaire was developed in accordance with the framework of the proposed model in Figure 1. The questionnaire assessed respondents’ beliefs concerning self-driving vehicles. Respondents were informed that for the purpose of this research, a self-driving vehicle is defined as follows:
“Your car is fully self-driving only on large, multi-lane highways. You must manually steer and accelerate/decelerate when on minor roads, but upon entering a highway the car can take full control and can steer, accelerate/decelerate and switch lanes as appropriate. The car does not rely on your input at all while on the highway. Upon reaching the exit of the highway, the car indicates that you must retake control of the steering and speed control” (Hewitt et al., 2019).
The above definition was used by Hewitt et al. (2019) in their description of a Level 4 autonomy scenario to survey respondents. In this study, the term “self-driving” replaced “autonomously” in the definition, as it was felt that respondents could better relate to and visualize self-driving vehicles vs. autonomous vehicles.
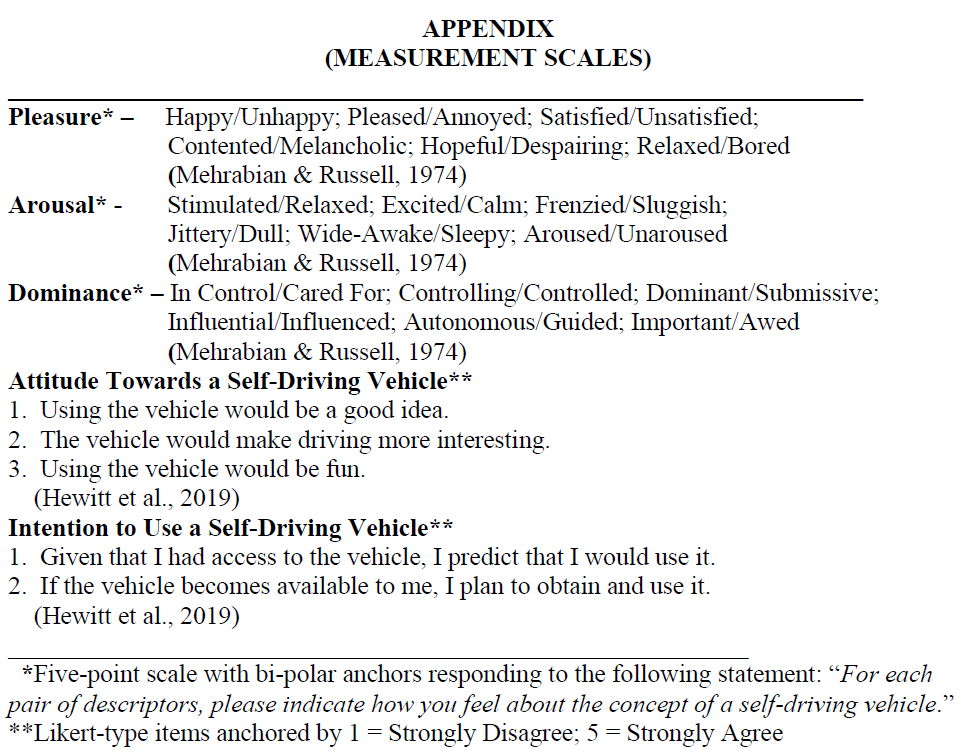
Measurement Scales
The measurement scales for Pleasure, Arousal, and Dominance were all five-point bi-polar anchor scales. Attitude Towards a Self-Driving Vehicle and Intention to Use a Self-Driving were measured using a five-point Likert-type scale ranging from “Strongly Disagree” (1) to “Strongly Agree” (5). Attitude Towards a Self-Driving Vehicle was a three-item scale, and Intention to Use a Self-Driving Vehicle was a two-item scale. (See Appendix)
Results
The internal reliability of the measurement scales were first assessed. The Cronbach’s alpha reliabilities for each construct are as follows: Pleasure (0.946); Arousal (0.793); Dominance (0.866); Attitude Towards a Self-Driving Vehicle (0.894), and Intention to Use a Self-Driving Vehicle (0.869). All reliabilities reflected excellent internal consistencies, with all values above the threshold value of 0.60 (Fornell & Larcker, 1981; Bagozzi & Yi, 1988).
The proposed theoretical model was then tested using Structural Equation Modeling (SEM). Three types of information were considered in assessing the model fit: chi-square, measurement error, and fit indices. Given that chi-square values tend to be sensitive to sample size and are likely to be significant if large datasets are utilized, chi-square is not an absolute criterion in evaluating model fit (Anderson & Gerbing, 1988). A second criterion that was examined was measurement error, namely RMSEA (root-mean-square error of approximation) and RMR (Root Mean Square Residual). The final piece of evidence examined were the fit indices of CFI (Comparative Fit Index), IFI (Incremental Fit Index), NFI (Normed Fit Index), and NNFI (Non-Normed Fit Index).
As shown in Table 1, the overall model fit was very good. Although the Chi-Square was significant at .01 level, the measurement error, indicated by RMSEA and RMR, were low at 0.07. In addition, all the fit indices, including CFI = 0.98, IFI = 0.98, NFI = 0.97, NNFI = 0.98, were all well above the acceptable cut-off values (Hu & Bentler, 1999). Therefore, the proposed theoretical model was accepted.
| Table 1 Proposed Theoretical Model Testing | |||||||||||
| Chi-Square | DF | Ratio | Sig. | RMSEA | RMR | CFI | IFI | NFI | NNFI | Decision | |
| Structure Model | 1413.45 | 225 | 6.28 | 000 | 0.07 | 0.07 | 0.98 | 0.98 | 0.97 | 0.98 | Accept |
Structural Model Analyses
Structural equation modeling (SEM) was also used to test the relationships between the theoretical constructs, as well as the hypotheses. Raw data were used as input, and the program analyzed the covariance matrix calculated from the raw data by using Maximum Likelihood (ML) estimation. Hypotheses were tested through path analysis. The significance of path coefficients in the model provides support for the hypothesized relationship (Bentler, 1989).
H1 proposed Arousal having a significant positive effect on Pleasure as it relates to the use of a self-driving. As shown in Table 2, H1 was supported (β = 0.25, p <0.01). H2 proposed Dominance having a significant positive effect on Arousal as it relates to the use of a self-driving. As shown in Table 2, H2 was supported (β = 0.78, p <0.01). Similarly, H3 proposed Dominance having a significant positive effect on Pleasure as it relates to the use of a self-driving. H3 was also supported (β = 0.56, p <0.01).
| Table 2 Hypotheses Testing | |||||
| DVs | Dominance | Arousal | Pleasure | Attitude | |
| Arousal | Path Coefficient | 0.78*** | |||
| T-Value | 16.97 | ||||
| Pleasure | Path Coefficient | 0.56*** | 0.25*** | ||
| T-Value | 10.98 | 5.13 | |||
| Attitude | Path Coefficient | 0.75*** | |||
| T-Value | 26.41 | ||||
| Intention | Path Coefficient | 0.96*** | |||
| T-Value | 36.65 | ||||
H4 postulated that Pleasure would have a significant positive effect on Attitude Towards a Self-Driving Vehicle. This hypothesis was supported (β = 0.75, p <0.01). Finally,
H5 was supported as Attitude Towards a Self-Driving Vehicle was found to have a significant positive effect on Intention to Use a Self-Driving Vehicle (β = 0.96, p <0.01).
Discussion
The findings of this study suggest that the speed at which self-driving vehicles are adopted by consumers will depend at least partially on the hedonic motive of perceived pleasure/ enjoyment consumers feel related to using a self-driving vehicle use. Perceived pleasure was also found to be directly impacted by perceived dominance and arousal associated with the use of a self-driving vehicle. In the hedonic context, therefore, it is essential that marketers identify factors affecting and generating arousal and dominance as they relate to using a self-driving vehicle.
Utilitarian motives, such as vehicle cost, perceived ease of use, security, reliability, and safety will likely also play a role in the success and rate of acceptance of self-driving vehicles. Marketers may have a tendency to emphasize more the utilitarian motives for self-driving vehicle usage at the expense of hedonic motives. Knowing that perceived dominance significantly impacts the pleasure an individual perceives while using a self-driving vehicle, not only directly but also indirectly through the mediation of arousal, marketers will need to emphasize in their promotional activities the level of control a driver will actually have when driving down the road. The fear of total helplessness while in the vehicle will likely dampen the enthusiasm/arousal, as well as the perceived enjoyment envisioned by a potential consumer. Allowing consumers to feel more important and involved while operating a self-driving vehicle should lead to greater enthusiasm and perceived pleasure.
Some reports predict that by 2030 self-driving vehicles will be replacing most human-operated vehicles (Litman, 2019). It appears that it is no longer a question of if we will one day have self-driving vehicles on the road within the U.S., but rather a question of when and under what conditions. The findings of this study indicate that the emotional motives of pleasure, arousal, and dominance either directly or indirectly impact a consumer’s attitude towards a self-driving vehicle. How marketers use this information will likely play a major role in the speed at which self-driving vehicles are accepted by U.S. consumers and adopted by the general driving population.
Research Challenges and Considerations
Although the results of this study provide a number of insights related to the use of a self-driving vehicle, a number of limitations do exist. First, the “intention to use” variable is a self-reported response that may differ significantly from actual use at a later date. The results of this study relied to a large extent on respondents’ imagination regarding the operation of self-driving vehicles. Once these vehicles are commercially available, intentions and attitudes may change either more positively or negatively. Second, the findings were obtained from a single study. Therefore, generalizing the results to the entire consuming population should be done with caution. Finally, although the sample size in this study was relatively large, respondent participation was based on self-selection, and as a result, some selection bias could exist within the sample.
Conclusions and Future Research Considerations
The current study is one of the first to find empirical evidence supporting the effectiveness of the PAD model in predicting attitude towards a self-driving vehicle, as well as confirming the interrelationships between the three emotional components (pleasure, arousal, dominance) of the PAD model as they relate to a self-driving vehicle. The results show that the hedonic motive of pleasure is a significant predictor of a consumer’s attitude toward the use a self-driving vehicle. Moreover, the results also provide clear evidence of the interrelationships between the three components of the PAD model as they relate to attitude towards a self-driving vehicle.
Additional research is needed to assess cultural differences that could influence the generalizability of consumer acceptance models for self-driving vehicles. McCoy et al. (2007) suggest that technology acceptance models, such as TAM (Davis, 1989), may not be applicable to all people, and that results may differ depending on respondents’ cultural orientation. A cross-cultural analysis would be beneficial, given major automobile manufacturers market their vehicles globally. Another area of investigation needed is how acceptance model results are impacted by different respondent usage motives. For example, the intention to use a self-driving vehicle might be impacted by different factors based on whether the individual’s primary motive for using this type of vehicle is for utilitarian reasons (e.g., safety, fuel efficiency, stress free driving) versus hedonic reasons (e.g., enjoyment, impressing family and friends).
References
- AAA. (2018). Advanced driver assistance systems (ADAS) repair costs, fact sheet. AAA News Room. [Online](https://newsroom.aaa.com); at https://bit.ly/39JO6CI (Accessed September 10, 2020).
- Anderson, J.C., & Gerbing, D.W. (1988). Structural equation modeling in practice: A review and recommended two-step approach. Psychological Bulletin, 103(3), 411-423.
- Babin, B.J., Darden, W.R., & Griffin, M. (1994). Work and/or fun: Measuring hedonic and utilitarian shopping value. Journal of Consumer Research, 20(4), 644-656.
- Bagozzi, R.P., & Yi, Y. (1988). On the evaluation of structural equation models. Academy of Marketing Science, 16(1), 74-94.
- Bakker, I., van der Voordt, T., Vink, P., & de Boon, J. (2014). Pleasure, arousal, dominance: Mehrabian and Russell revisited. Current Psychology, 33, 405-421.
- Bellet, T., Cunneen, M., Mulluns, M., Murphy, F., Putz, F., Spickermann, F., Braendle, C., & Baumann, M.F. (2019). From semi to fully autonomous vehicles: New emerging risks and ethico-legal challenges for human-machine interactions. Transportation Research Part F: Traffic Psychology and Behaviour, 63, 153-164.
- Bentler, P.M. (1989). EQS: Structural Equations Program Manual, version 3.0. Los Angeles: BMDP Statistical Software Inc.
- Buckley, L., Kayec, S.A., & Pradhan, A.K. (2018). Psychosocial factors associated with intended use of automated vehicles: A simulated driving study. Accident Analysis and Prevention, 115, 202-208.
- Canis, B. (2017). Autonomous Vehicles: Emerging Policy Issues. Congressional Research Service. [Online] Available: https://crsreports.congress.gov (May 23, 2017).
- Chang, S., Chih, W., Liou, D., & Hwang, L. (2014). The influence of web aesthetics on customers PAD. Computers in Human Behavior, 36, 168-178.
- Charness N., Yoon J.S., Souders D., Stothart C., & Yehnert C. (2018). Predictors of attitudes toward autonomous vehicles: The roles of age, gender, prior knowledge, and personality. Frontiers in Psychology, [online] doi: 10.3389/fpsyg.2018.02589 (Accessed August 15, 2020).
- Choi, J.K., & Ji, Y.G. (2015). Investigating the importance of trust on adopting an autonomous vehicle. International Journal of Human-Computer Interaction, 31(10), 692-702.
- Craig, D., & Lofton, L. (2019). The vehicle of the future. Auto Body Repair Network, June, 28-34.
- Davis, F.D. (1989). Perceived usefulness, perceived ease of use, and user acceptance of information technology’. MIS Quarterly, 13(3), 319-340.
- Donovan, R.J., & Rossiter, J.R. (1982). Store atmosphere: An environmental psychology approach. Journal of Retailing, 58, 34-57.
- Ensuring American Leadership in Automated Vehicle Technologies. (2020). A Report by the NATIONAL SCIENCE & TECHNOLOGY COUNCIL and the UNITED STATES DEPARTMENT OF TRANSPORTATION, January 2020.
- Eroglu, S.A., Machleit, K.A., & Davis, L.M. (2003). Empirical testing of a model of online store atmospherics and shopper responses. Psychology & Marketing, 20, 139-150.
- Fraedrich, E., Heinrichs, D., Bahamonde-Birke, F.J., & Cyganski, R. (2019). Autonomous driving the built environment and policy. Transportation Research Part A: Policy and Practice, 122, 162-172.
- Fiore, A.M, Jin, H.J., & Kim, J. (2005). For fun and profit: Image interactivity, hedonic value, and responses towards an online store. Psychology and Marketing, 22, 669 - 694.
- Fornell, C., & Larcker, D.F. (1981). Evaluating structural equation models with unobservable variables and measurement error. Journal of Marketing Research, 18(1), 39-50.
- Hall, M., Elliott, K., & Meng, J. (2017). Using the PAD (Pleasure, Arousal, and Dominance) model to explain Facebook attitudes and use intentions. The Journal of Social Media in Society, 6(1), 144-169.
- Hsieh, J., Hsieh, Y., Chiu, H., & Yang, Y. (2014). Customer response to web site atmospherics: Task relevant cues, situational involvement and PAD. Journal of Interactive Marketing, 28, 225-236.
- Hewitt, C., Amanatidis, T., Politis, I., & Sarkar, A. (2019). Assessing public perception of self-driving cars: Autonomous vehicle acceptance model. 24th International Conference on Intelligent User Interfaces, July 2019. [online] https://doi.org/10.1145/3301275.3302268 (Accessed September 10, 2020).
- Hu, L., & Bentler, P.M. (1999). Cutoff criteria for fit indexes in covariance structure analysis: conventional criteria versus new alternatives. Structural Equation Modeling, 6(1), 1-55.
- J.D. Power Mobility Confidence Index Study (2019). Mobility Pipe Dreams? J.D. Power and SurveyMonkey Uncover Shaky Consumer Confidence About the Future. [online] https://www.jdpower.com/business/press-releases/2019-mobility-confidence-index-study-fueled-surveymonkey-audience (Accessed August 10, 2020).
- Jing, P, Xu, G., Chen, Y., Shi, Y., & Zhan, F. (2020). The determinants behind the acceptance of autonomous vehicles: A systematic review. Sustainability, 12(5), [online] https://doi.org/10.3390/su12051719 (Accessed October 20, 2020).
- Koo, D., & Lee, J. (2011). Inter-relationships among dominance, energetic and tense arousal, and pleasure, and differences in their impacts under online and offline environment. Computers in Human Behavior, 27, 1740-1750.
- Lavieri, P., Garikapati, V., Bhat, C., Pendyala, R., Astroza, S., & Dias, F. (2017). Modeling individual preferences for ownership and sharing of autonomous vehicle technologies. Transportation Research Record: Journal of the Transportation Research Board, 2665, 1-10.
- Leicht, T., Chtourfou, A., & Youssef, K.B. (2018). Consumer innovativeness and intentioned autonomous car adoption. Journal of High Technology Management Research, 29, 1-11.
- Litman, T. (2019). Autonomous vehicle implementation predictions: Implications for transport planning. Victoria Transport Policy Institute, 18, 1-39.
- Litman, T. (2020). Autonomous vehicle implementation predictions: Implications for transport planning. Victoria Transport Policy Institute, 24, 1-45.
- Macleod, A., & Santarini, M. (2019). Paving the way to verify and validate the design of first-generation automated driving vehicles. Electronic Component News, January/February, 14-18.
- Madigan, R, Louw, T., Wilbrink, M., Schieben, A., & Merat, N. (2017). What influences the decision to use automated public transport? Using UTAUT to understand public acceptance of automated road transport systems. Transportation Research Part F: Traffic and Psychology and Behavior, 50, 55-64.
- May, K.R., Noah, B.E., & Walker, B.N. (2017). Driving acceptance: Applying structural equation modeling to in-vehicle automation acceptance’. Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications Adjunct, ACM, 190-194.
- McCoy, S., Galletta, D.F., & King, W.R. (2007). Applying TAM across cultures: the need for Caution’. European Journal of Information Systems, 16(1), 81-90.
- Mehrabian, A., & Russell, J.A. (1974). An approach to environmental psychology, Cambridge, MA: MIT Press.
- Mims, C. (2019). Self-driving cars’ problem: Safer human-driven ones. Wall Street Journal, June 15, B1 & B6.
- Miniero, G., Rurale, A., & Addis, M. (2014). Effects of arousal, dominance, and their interaction on pleasure in a cultural environment. Psychology & Marketing, 31(8), 628-634.
- National Highway Traffic Safety Administration. (2020). Automated vehicles for safety. [online] https://www.nhtsa.gov/technology-innovation/automated-vehicles-safety (Accessed July 23, 2020.
- Ness, M. (2016). Acceptance of self-driving cars: An examination of idealized versus realistic portrayals with a self-driving car acceptance scale’. Proceedings of the Human Factors and Ergonomics Society 2016 Annual Meeting, 1449-1453.
- Nordhoff, S., van Arem, B., & Happee, R. (2016). Conceptual model to explain, predict, and improve user acceptance of driverless podlike vehicles. Transportation Research Record, 2602(1), 60-67.
- Osswald, S., Wurhofer, D., Trosterer, S., Beck, E., & Tscheligi, M. (2012). Predicting information technology usage in the car: Towards a car technology acceptance model, Automotive UI, 51-58.
- Panagiotopoulos, I., & Dimitrakopoulous, G. (2018). An empirical investigation on consumers’ intentions towards autonomous driving. Transportation Research Part C: Emerging Technologies, 95, 773-784.
- Papa, E., & Ferreira, A. (2018). Sustainable accessibility and the implementation of automated vehicles: Identifying critical decisions. Urban Science, 2(1). [Online] https://bit.ly/2DHjZQz (Accessed September 17, 2020).
- Papagiannidis, S., Pantano, E., See-To, E., Dennis, C., & Bourlakis, M. (2017). To immerse or not? Experimenting with two virtual retail environments. Information Technology & People, 30(1), 63-188.
- Pettersson, I.M., & Karlson, A. (2015). Setting the stage for autonomous cars: A pilot study of future autonomous driving experiences. IET Intelligent Transport Systems, 9(7), 694-701.
- Purwanto, S., Hartini, S., & Premananto, G.C. (2019). Understanding consumer intention to use Go-Pay: Development and testing of technology acceptance models for consumers. EKSIS, 14(1).[online]http://ejournal.stiedewantara.ac.id/index.php/issue/view/39 (Accessed August 16, 2020).
- Rogers, E.M. (2003). Diffusion of Innovations; The Free Press: New York, NY.
- Society of Automobile Engineers (SAE) International, (2018). [online] https://www.sae.org/news/press-room/2018/12/sae-international-releases-updated-visual-chart-for-its-%E2%80%9Clevels-of-driving-automation%E2%80%9D-standard-for-self-driving-vehicles (Accessed July 12, 2020).
- Sener, I.N., Zmud, J., & Williams, T. (2019). Measures of baseline intent to use automated vehicles: A case study of Texas cities. Transportation Research Part F: Traffic and Psychology and Behaviour, 62, 66-77.
- Taeihagn, A., & Lim, H.S.M. (2018). Governing autonomous vehicles: Emerging responses for safety, liability, privacy, cybersecurity, and industry risks. Transport Reviews. [Online] https://bit.ly/2DYQaLd (Accessed September 17, 2020).
- Xu, Z., Zhang, K., Min, H., Wang, Z., Zhao, X., & Liu, P. (2018). What drives people to accept automated vehicles? Findings from a field experiment. Transportation Research Part C: Emerging Technologies, 95, 320-334.
- Yani-de-Soriano, M., Foxall, G.R., & Newman, A.J. (2013). The impact of the interaction of utilitarian and informational reinforcement and behavior setting scope on consumer response. Psychology & Marketing, 30, 148-159.
- Zhang, T., Tao, D., Qu, X., Zhang, X., Lin, R., & Zhang, W. (2019). The roles of initial trust and perceived risk in public’s acceptance of automated vehicles. Transportation Research Part C: Emerging Technologies, 98, 207-220.
- Zhang, T., Tao, D., Qu, X., Zhang, X., Zeng, J., Zhu, H., & Zhu, H. (2020). Automated vehicle acceptance in China: Social influence and initial trust are key determinants. Transportation Research Part C: Emerging Technologies, 112, 220-233.